About
What is the Bridge Inspection Robot?
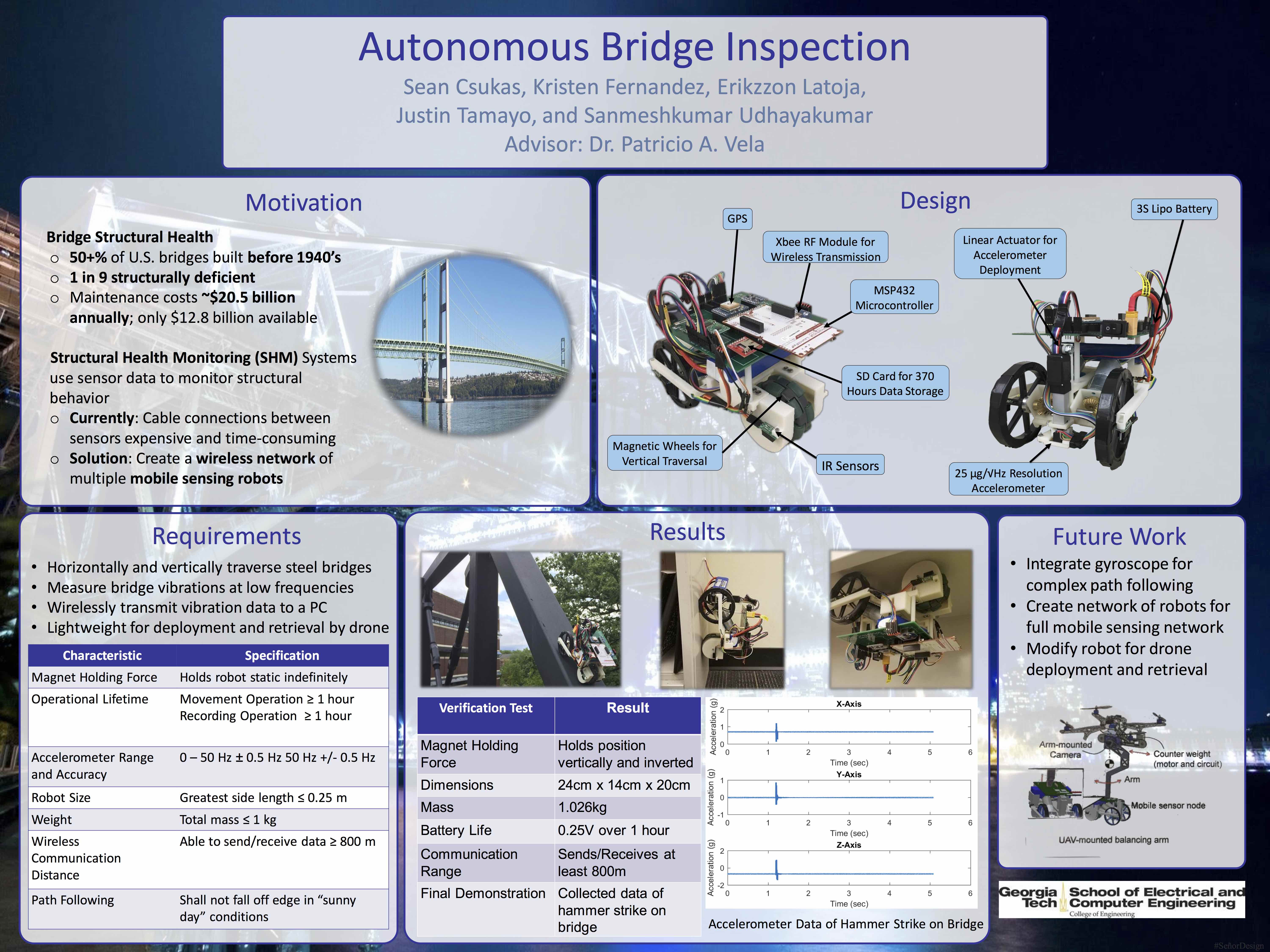
The purpose of the Bridge Inspection Robot is to navigate metal bridges and record structural vibration data, which can then be used to monitor the structural health of these bridges over time. Prior to the conception of having such robots as mobile sensors, a series of accelerometers would have to be placed along a bridge by hand, and then re-positioned for each new set of recordings. Utilizing Bridge Inspection Robots will dramatically speed up vibration data collection, allowing for faster structural analysis and identification of faults and issues.
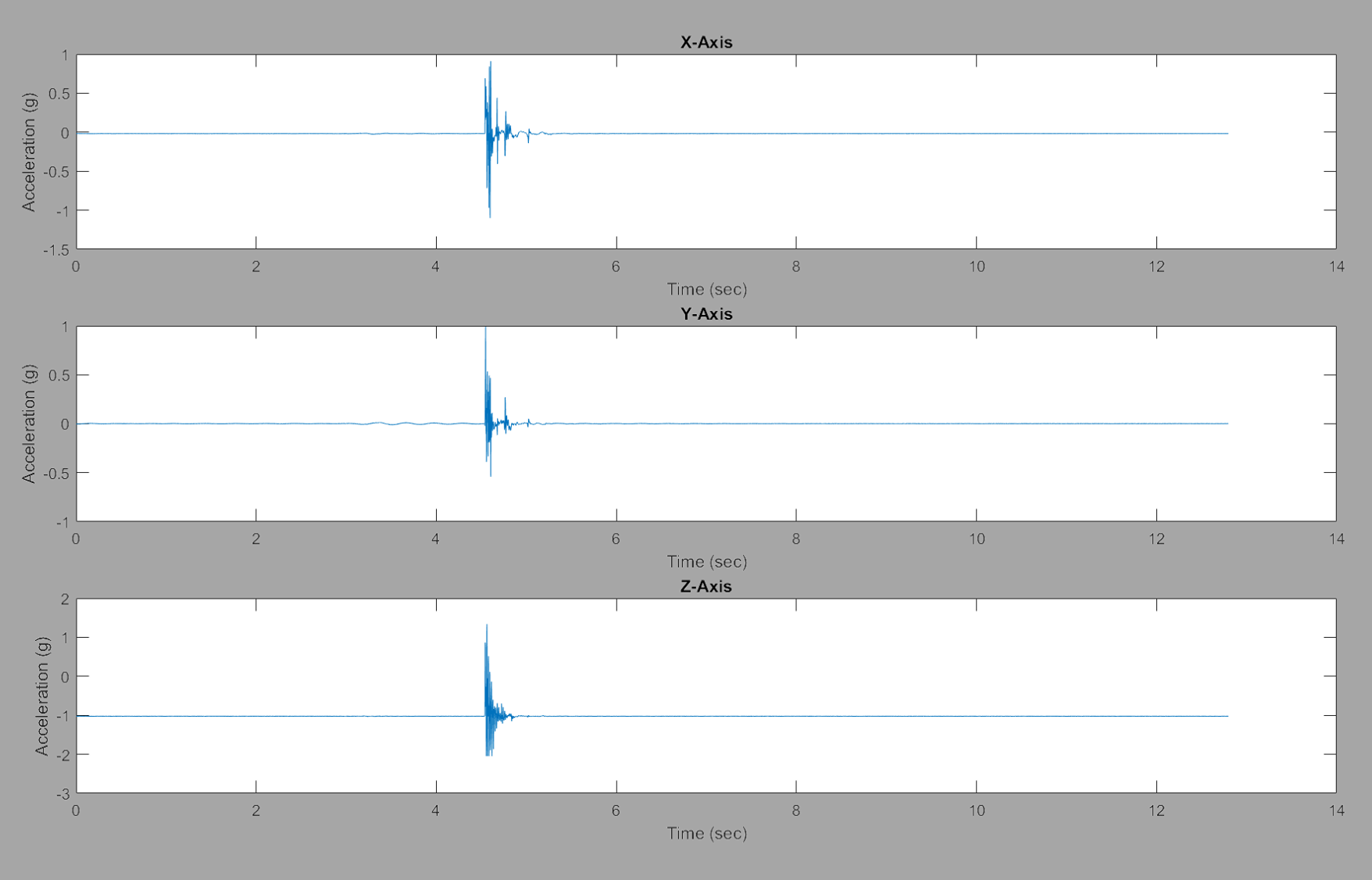
The Bridge Inspection Robot, upon initialization, wirelessly connects to a computer and receives commands from a human inspector. The robot is instructed to traverse the frame of a bridge. The robot can move without falling off the bridge via pathfinding, utilizing onboard IR sensors that detect the bridge’s edges. As the robot traverses the bridge, it takes measurements of the bridge’s frequency response with an attached accelerometer. This data is then wirelessly transmitted back to the computer for storage and later processing.
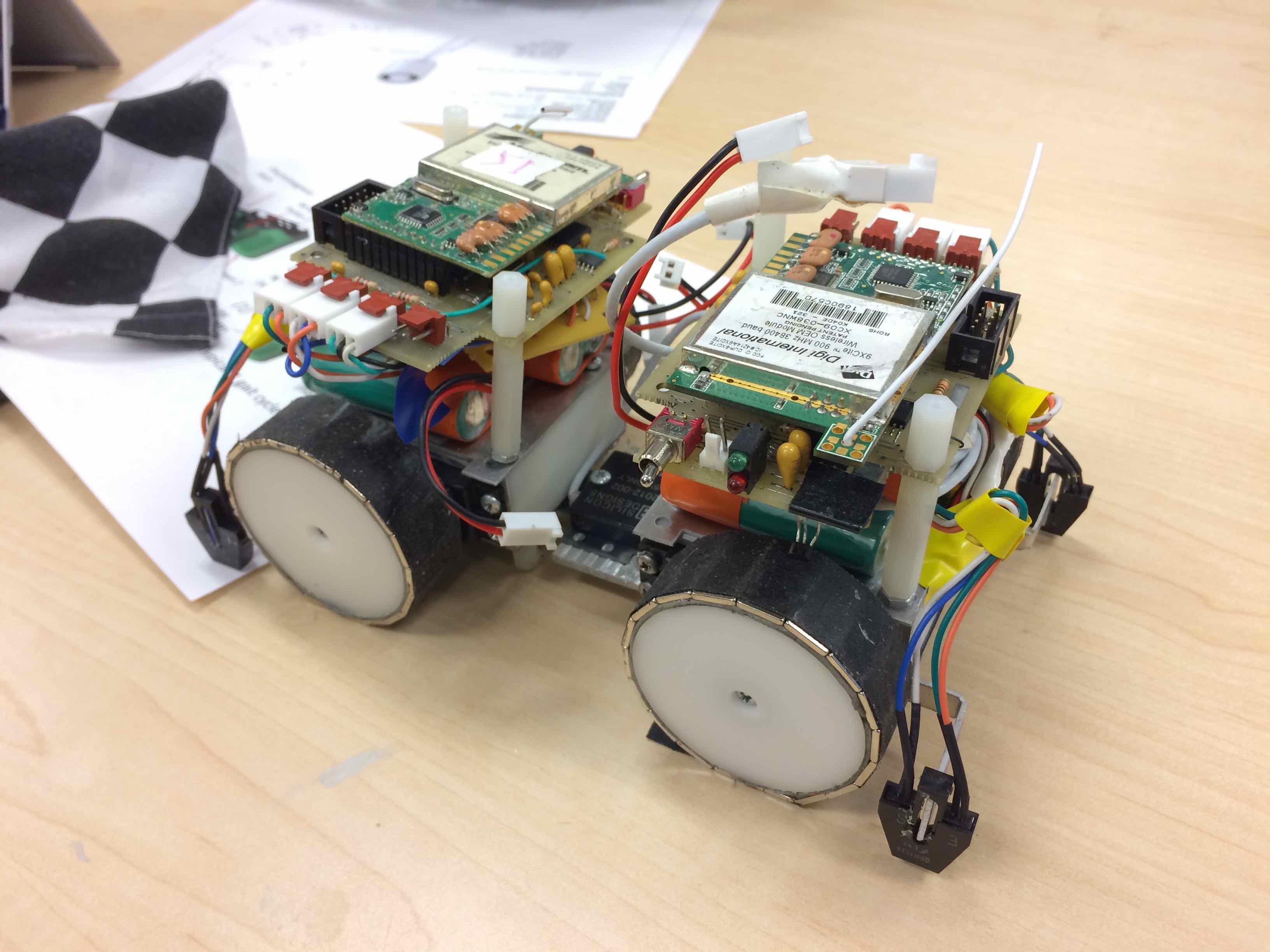
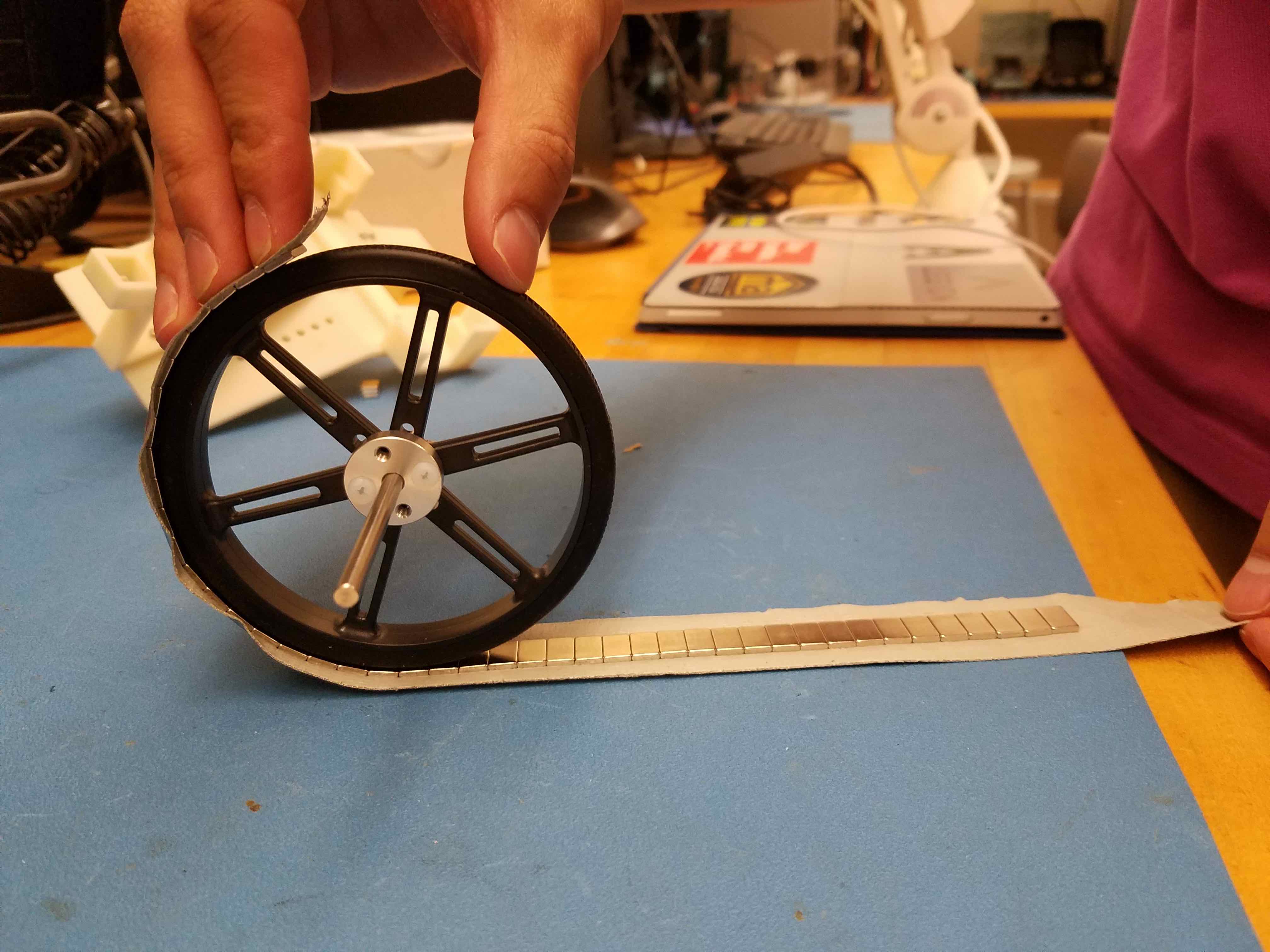
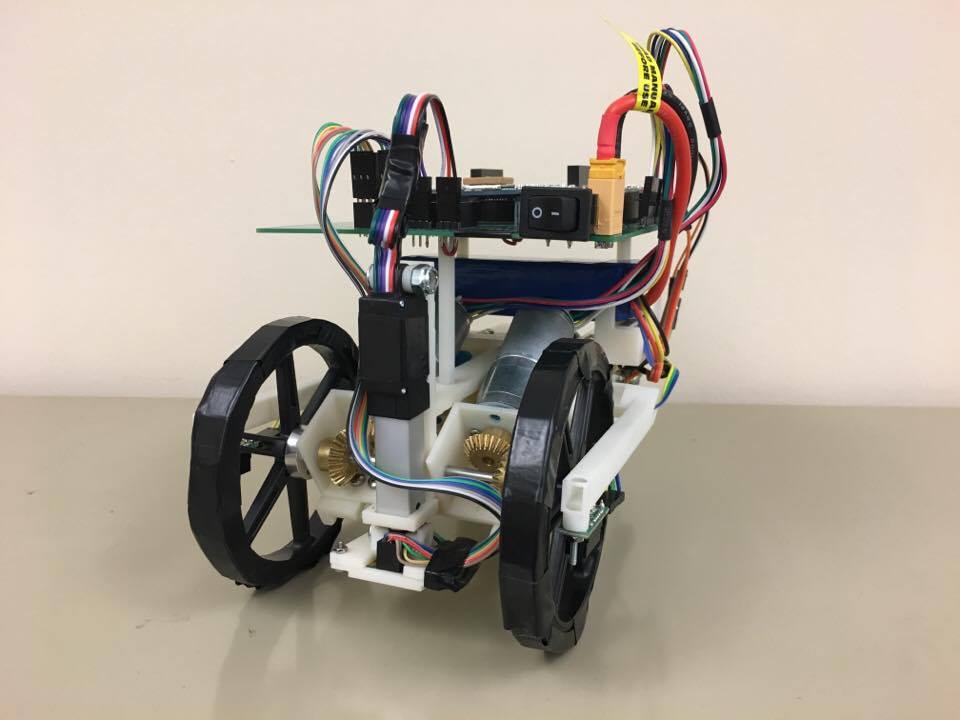
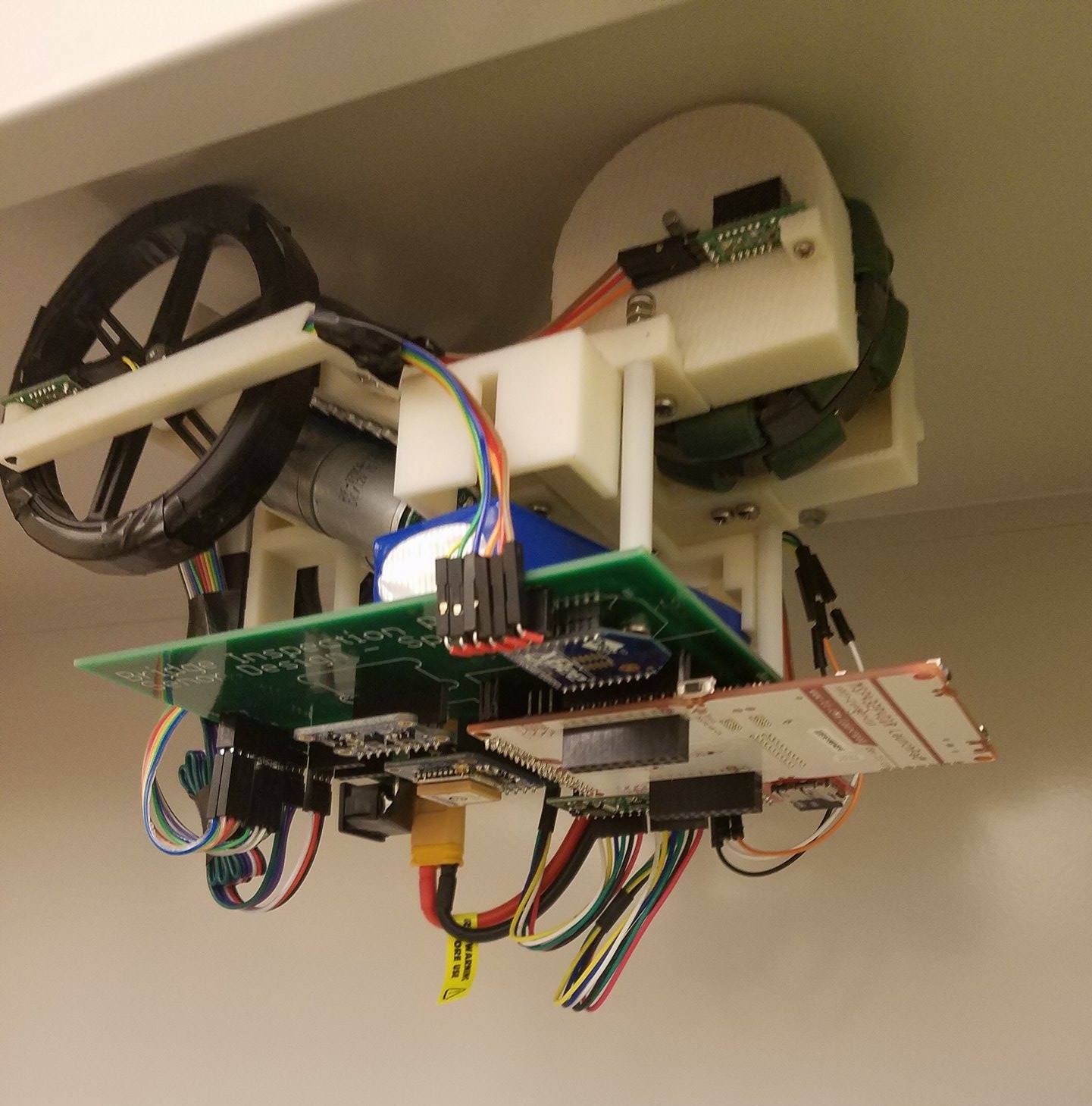
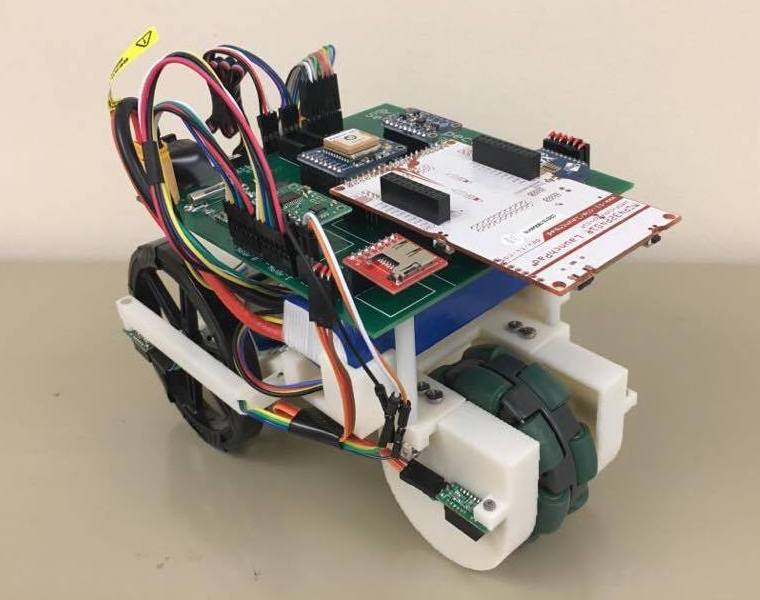
A previous iteration of the Bridge Inspection Robot exists; this version uses magnetized wheels to secure the robot on a metal bridge. This design has been proven to function as intended, though it lacks the ability to turn left or right. Given that this design is also five years old, the project team intends to eliminate obsolescence by implementing mechanical and electronic improvements with a ground-up redesign. One considerable upgrade was the change to a three-wheeled design which provides increased maneuverability. The robot has two large, motorized, magnetic front wheels and a rear, unpowered omni-wheel that is also flanked by magnets. A prototype robot designed with consumer off-the-shelf parts costs approximately $450.63.
Documentation
This is the senior design project for Georgia Tech's ECE Senior Design course (ECE 4012).
To the right you can find our technical review papers, proposals, final papers, and supplemental documents we created for the project.